Facade Pattern
퍼사드 패턴은 한 서브시스템 내의 인터페이스 집합에 대한 획일화된 하나의 인터페이스를 제공하는 패턴으로 서브시스템을 사용하기 쉽도록 상위 수준의 인터페이스를 제공한다.
활용성
- 복잡한 서브시스템에 대한 단순한 인터페이스 제공이 필요할 때
- 추상 개념에 대한 구현 클래스와 사용자 사이에 너무 많은 종속성이 존재할 때
- 서브시스템을 계층화시킬 때
퍼사드 패턴 사용에 따른 결과
서브시스템의 구성요소 보호
서브시스템의 구성요소를 보호함으로 써 사용자가 다루어야할 객체의 수가 줄어들며 서브시스템을 쉽게 사용할 수 있다.
서브시스템과 사용자 코드간 결합도 저하
사용자 코드에서 서브시스템을 직접 사용하면 결합도가 높아지기 마련이다. 퍼사드 패턴을 통해 획일화된 인터페이스를 제공함으로써 결합도를 낮출 수 있다.
서브시스템 사용자 코드에서 호출 가능
서브시스템을 사용자 코드에서 직접 사용하는것을 막지는 않는다. 그렇기 때문에 사용자가 퍼사드를 사용할지 서브시스템을 사용할지 결정권을 부여할 수 있다.
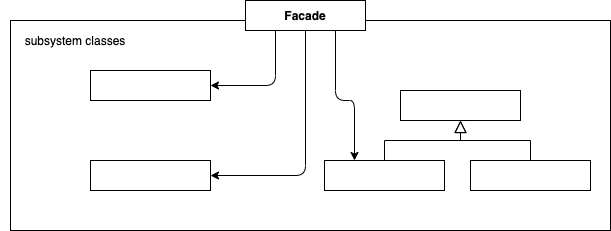
퍼사드
구조
퍼사드의 구조는 다음과 같다.
C++ 구현
1
2
3
4
5
6
| void FacadePattern::runRobot()
{
Robot* robot = new Robot();
robot->runRobot();
robot->offRobot();
}
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
| class Robot
{
RobotEye* robotEye;
RobotArm* robotArm;
RobotLeg* robotLeg;
public:
Robot()
{
this->robotEye = new RobotEye();
this->robotArm = new RobotArm();
this->robotLeg = new RobotLeg();
}
void runRobot()
{
robotEye->run();
robotArm->run();
robotLeg->run();
}
void offRobot()
{
robotEye->off();
robotArm->off();
robotLeg->off();
}
};
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
| class RobotEye
{
public:
RobotEye() {}
void run()
{
std::cout<<"Robot Eye Blinking"<<std::endl;
}
void off()
{
std::cout<<"Robot Eye off"<<std::endl;
}
};
class RobotArm
{
public:
RobotArm() {}
void run()
{
std::cout<<"Robot Arm Shaking"<<std::endl;
}
void off()
{
std::cout<<"Robot Arm off"<<std::endl;
}
};
class RobotLeg
{
public:
RobotLeg() {}
void run()
{
std::cout<<"Robot Leg Walking"<<std::endl;
}
void off()
{
std::cout<<"Robot Leg off"<<std::endl;
}
};
|
java 구현
1
2
3
4
5
6
7
| public class Client {
public static void main(String[] args) {
Robot robot = new Robot();
robot.runRobot();
robot.offRobot();
}
}
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
| public class Robot {
private RobotEye robotEye;
private RobotArm robotArm;
private RobotLeg robotLeg;
public Robot() {
this.robotEye = new RobotEye();
this.robotArm = new RobotArm();
this.robotLeg = new RobotLeg();
}
public void runRobot() {
this.robotEye.run();
this.robotArm.run();
this.robotLeg.run();
}
public void offRobot() {
this.robotEye.off();
this.robotArm.off();
this.robotLeg.off();
}
}
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
| public class RobotEye {
public void run() {
System.out.println("Robot Eye Blinking");
}
public void off() {
System.out.println("Robot Eye off");
}
}
public class RobotArm {
public void run() {
System.out.println("Robot Arm Shaking");
}
public void off() {
System.out.println("Robot Arm off");
}
}
public class RobotLeg {
public void run() {
System.out.println("Robot Leg Walking");
}
public void off() {
System.out.println("Robot Leg off");
}
}
|
